

Hast du schon einmal gehört, wie eine CNC Fräse oder ein 3D Drucker Musik abspielt? Wenn ja, dann wird es sich sehr wahrscheinlich um ein Gerät mit kartesischen Koordinaten gehandelt haben oder auch um einen DeltaBot, jedoch nur einstimmig. Denn das Erzeugen von mehrstimmiger Musik mittels eines DeltaBots ist deutlich komplizierter und rechenaufwendiger als bei Geräten mit kartesischen Koordinaten. Wie es prinzipiell funktioniert, erfährst du hier.
Inhaltsverzeichnis
Musik mit CNC Fräse oder 3D Drucker (mit kartesischen Koordinaten) erzeugen
Die meisten, die diesen Artikel hier lesen, haben vermutlich schon ein oder mehrere Videos von CNC Fräsen oder 3D Druckern gesehen, welche Musik abspielen. Diese Maschinen haben in der Regel fast alle einen kartesischen Antrieb, d.h. jeweils ein Motor bewegt den Fräser oder Druckkopf entlang einer kartesischen Koordinate, also entlang einer Dimension. Diese Bauweise eignet sich hervorragend zum Musik-Erzeugen, da die Geschwindigkeit des Fräsers entlang einer Koordinate direkt proportional zur Umdrehungszahl des jeweiligen Motors und damit auch direkt proportional zur Frequenz, mit der der Motor angesteuert wird, ist. Oder anders gesagt: wenn ich mit einem Motor z.B. eine doppelt so hohe Frequenz abspielen möchte, dann teile ich dem Fräsprogramm einfach eine doppelt so hohe Geschwindigkeit entlang der Koordinatenachse mit. Da die meisten gängigen Fräs- und 3D-Druck-Programme mit kartesischen Koordinaten arbeiten, kann man somit relativ problemlos den G-Code aus einer Midi-Datei erzeugen. Wie das genau funktioniert erfährst du hier. Der entsprechende Online-Konverter ist hier zu finden.
Musik mit einem DeltaBot erzeugen
Bauweise eines DeltaBots
Fräsmaschinen in DeltaBot-Bauweise gibt es soweit ich weiß keine (oder nur ganz wenige), da diese Bauweise für hohe Kräfte, die auf einen Fräser wirken, ziemlich ungeeignet ist. Allerdings gibt es einige 3D-Drucker in dieser Ausführung. Es sei hier noch zu erwähnen, dass es verschiedene DeltaBot-Bauweisen gibt. Ich beschränke mich an dieser Stelle auf folgenden DeltaBot:
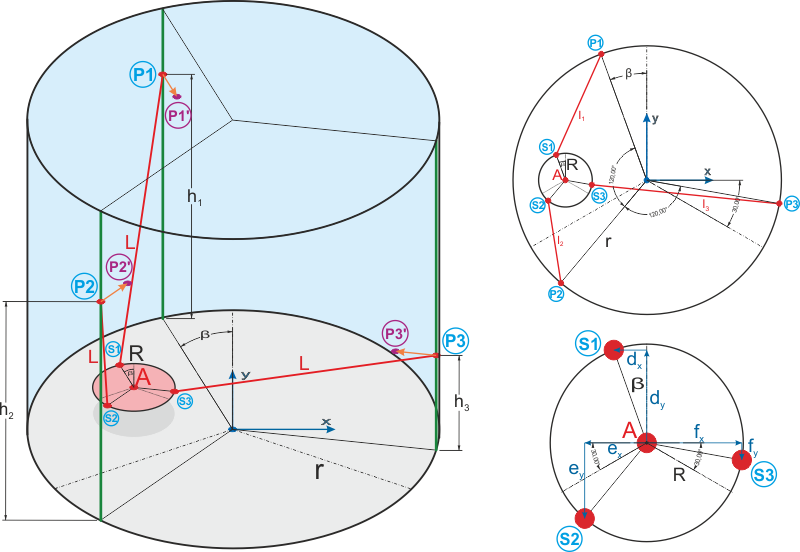
Funktionsweise eines DeltaBots
Dieser DeltaBot funktioniert prinzipiell so, dass insgesamt drei Motoren jeweils die Punkte P1, P2 und P3 entlang der grünen Linien bewegen. Abhängig von der Position dieser drei Punkte verändert sich somit auch die Position des Punktes A, da die rote Scheibe durch drei Stäbe mit den Punkten P1, P2 und P3 verbunden ist.
Musik mit einem DeltaBot erzeugen: so geht's
Da ich stets meinen MIDI → G-Code-Konverter weiterentwickle, habe ich mir irgendwann einmal gedacht, mit solch einem DeltaBot müsste man doch auch dreistimmige Lieder abspielen können. Dies stimmt prinzipiell auch, jedoch habe ich zu diesem Zeitpunkt den Rechenaufwand erheblich unterschätzt!
Zunächst einmal sollte man sich bewusst machen, was man denn prinzipiell dem Fräs- oder 3D-Druck-Programm mitteilt: Man teilt dem Programm Koordinaten und Geschwindigkeit mit. Und zwar von Punkt A. Und genau hier liegt schon das große Problem. Es nutzt überhaupt nichts, wenn man vorgibt, zu welcher Position und mit welcher Geschwindigkeit sich der Punkt A bewegt, da dieser Punkt keine Geräusche bzw. Musik erzeugt. Die Geräusche werden von den drei Motoren, die die Punkte P1, P2 und P3 antreiben, erzeugt. Zum Musik-Erzeugen muss man also dazu in der Lage sein, die Positionen und Geschwindigkeiten, mit denen sich die Punkte P1, P2 und P3 bewegen, vorzugeben und daraus wiederum die Geschwindigkeit bzw. Position des Punktes A zu berechnen. Die inverse Richtung sollte man ebenfalls berechnen können, um festzustellen, in welchem Bereich sich die Punkte P1, P2 und P3 bewegen dürfen.
Berechnungen zur Vorwärts- und Rückwärtskinematik: Ergebnis
Da die ganzen Formeln von der Berechnung sowohl der Vorwärtskinematik als auch der Rückwärtskinematik relativ unschön sind, möchte ich die Ergebnisse der Übersicht halber nicht auf dieser Seite darstellen. Wer sich mit höherer Mathematik auskennt und sich dafür genauer interessiert, der findet alle Berechnungen in diesem PDF.
Fazit
Sofern man sich das PDF angeschaut hat, kann man abschließend wohl eindeutig sagen, dass die Musik-Erzeugung mit einem DeltaBot wesentlich schwieriger und vor allem rechenaufwendiger ist bzw. genauer gesagt die Berechnung des G-Codes. Dieser Artikel schafft die theoretische Grundlage zur Implementierung eines Musik → G-Code-Konverters für DeltaBots. Ich hoffe, dass meine Berechnungen korrekt sind und dass ich keine grundlegenden Aspekte vergessen oder nicht beachtet habe. Natürlich versuche ich meinen MIDI → G-Code-Konverter irgendwann mit dieser Berechnungsvorschrift zu erweitern, aber bis dahin wird vermutlich noch einige Zeit vergehen. Insbesondere hoffe ich natürlich auch, dass dies nicht zu rechenaufwendig ist, da für jede einzelne G-Code-Zeile die komplette Berechnung durchgeführt werden muss.




